
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
- directx
- LineTracer
- 컴퓨터 그래픽스
- arduino compiler
- 아두이노 소스
- 시스템프로그래밍
- C언어
- 아두이노
- 아두이노 컴파일러
- Deque
- vector
- Algorithm
- Arduino
- map
- 라인트레이서
- 수광 소자
- c++
- priority_queue
- 자료구조
- Visual Micro
- Stack
- set
- html
- list
- 운영체제
- stl
- WinAPI
- queue
- 통계학
- Array
- Today
- Total
목록서보모터 (2)
Kim's Programming
 아두이노 Servo 모터 무한회전 개조
아두이노 Servo 모터 무한회전 개조
서보모터는 보통 180도 까지만 회전 할 수 있게 만들어 놓았습니다. 조정도 180도 까지만 되고 더 돌아가지도 않습니다. 서보모터를 바퀴와 같이 360도 회전이 가능하게 만들려면 개조가 필요합니다. 우선 동영상 먼져 보시면서 따라 하셔도 되지만, 중간중간 헷갈릴 부분만 짚겠습니다. Servo모터 개조 과정을 간단하게 말하면 다음과 같이 됩니다. 서보모터 분해 모터 엔코더 제어 부분을 제거(가변저항에 연결됨) 제거한 부분에 22옴 저항을 직렬 연결 서보모터 기어에 있는 180도 멈춤 돌기를 제거 합니다. 조립하고 확인을 합니다. 다른 것들을 따라하기 정말 간단하지만 간과하고 넘어가기 쉬운 부분만 하나 짚고 가겠습니다. Servo모터가 그냥 180도 멈춤 돌기만 제거하면 된다고 생각하는 경우가 생겨서 돌기..
 아두이노 servo 모터
아두이노 servo 모터
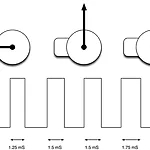
음 이번엔 서보 모터에 대해서 알아보겠습니다. 우선 작동원리입니다. 서보모터는 펄스의 길이에 따라서 움직이는 방향이 정해집니다. 음... 뭐 펄스가 감이 안온다면 직접 보면 되겠죠? 먼져 회로를 구성합니다 서보모터는 3가닥의 선으로 이루어 져 있습니다. Gnd Vcc 그리고 신호선 입니다. 위의 그림에서는 서보모터를 보드에 직접 연결을 하였으나. 사실 저렇게 연결을 해도 잘 움직이지 않습니다. 이유는 USB로 연결된 아두이노 보드의 전력이 서보 모터를 돌리기 어렵습니다. 그래서 중간에 전원을 따로 입력해 주어야 합니다 그렇게 저도 구성을 해보았습니다. (오른쪽에 가려진 부분은 전원입니다) 서보모터를 전원에 연결해주고 GND 레벨을 맞추기 위하여 CPU에도 전원을 연결하였습니다. 자 이제 코드를 입력해서 ..