
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| 31 |
- C언어
- 아두이노 컴파일러
- 컴퓨터 그래픽스
- directx
- 수광 소자
- 아두이노
- 운영체제
- vector
- set
- c++
- list
- Stack
- map
- 통계학
- 자료구조
- queue
- 시스템프로그래밍
- Arduino
- Algorithm
- Deque
- WinAPI
- 라인트레이서
- stl
- Visual Micro
- 아두이노 소스
- priority_queue
- LineTracer
- arduino compiler
- html
- Array
- Today
- Total
목록아두이노 소스 (7)
Kim's Programming
 Visual Micro 설정(3/4)
Visual Micro 설정(3/4)
이제 설치도 마쳤으니 이제 아두이노 사용을 위한 기본 설정을 해보도록 하겠습니다 처음 화면입니다. 여기서 메뉴 부분을 클릭하여 Arduino Boards Arduino Current Board Options Arduino Serial Communications 세가지를 선택하여 줍니다. 선택을 하면 위와 같이 간편 설정 단추들이 생긴것으 볼 수 있습니다. 다음은 비주얼 마이크로 설정 부분입니다. 설치하신 플러그인에 대한 모든 설정은 메뉴의 도구의 visual micro항목에 모두 있습니다. 아두이노 컴파일에 대한 세부 설정을 할 수 있습니다. 다음 포스팅에서는 아두이노 프로젝트 생성에 대해서 포스팅 하겠습니다
 Visual Micro 설치(2/4)
Visual Micro 설치(2/4)
지난 포스트에서는 VIsual Micro의 기능들에 대해서 알아 봤으니 이번엔 설치 과정을 알아 보도록 하겠습니다. 일단 저는 Window7 64bit에 Visual Studio 2013을 이용중입니다. 거의 유사하나 혹시나 차이가 있을까봐 사양도 같이 적어둡니다^^; 우선 VIsual Micro 홈페이지(새창)로 들어갑니다. 홈페이지에 들어간 후 왼쪽 상단의 Download를 눌러줍니다. Download Latest Visual Micro 버튼을 눌러 플러그인을 받습니다. 경로 설정후 Next 사용 약관 동읳후 Next 설치를 한뒤 설치가 완료 되었습니다. 다음 포스팅에서는 기본 설정에 대해서 알아보겠습니다
 Visual Micro 특징(1/4)
Visual Micro 특징(1/4)
아두이노 기본 컴파일러를 사용하다 보면 불편함이 많습니다. 저처럼 visual studio 같은 컴파일러를 이용하다가 사용하면요 하지만 이번에 VIsual Micro 라는것을 설명해 드리도록 하겠습니다. Visual Micro란? Visual Studio 프로그램 위에서 아두이노 코딩, 시리얼 통신, 등을 할 수 있게 해주는 Visual Studio 플러그인입니다. 다운로드 : http://www.visualmicro.com/ 사진에서 볼 수 있듯이 비주얼 스튜디오 처럼 간편하게 입력을 할 수 있습니다. 또한 Serial 구조체에서 호출을 할 떄 Serial 구조체를 따로 들여다 볼 필요없이 호출하는의미의 . 을 입력하는 순간 Serial 구조체의 호출할 수 있는 모든 내용들이 쫘악 뜨고 사용자는 선택만..
 Arduino코딩 준비
Arduino코딩 준비
Arduino 코딩은 음.. .C++에 가장 유사한것 같습니다. 클래스 상속도 보이는거 보면.. 또 어떻게 보면 자바인것 같기도 하구요 이번 포스팅에서는 아두이노 코딩의 구조와 컴파일러에 대해서 알아보겠습니다. 일단 아두이노(Arduino)라는 것에 대해 먼져 알아 보겠습니다. 아두이노는 오픈소스를 기반으로 한 단일 보드 마이크로컨트롤러로 완성된 보드와 관련 개발 도구 및 환경을 말을 합니다. 이 기기의 장접은 윈도, MAC OS X. 리눅스 등 여러 OS를 지원하고 보드에 대한 회로도도 공개가 되어있으면 무엇보다 컴파일후 따로 업로드 과정이 필요없이 USB를 통하여 쉽게 업로드를 할 수 있다는 장점이 있습니다. 이러한 아두이노 보드 그럼 어떻게 이용할까요? 먼져 컴파일러부터 알아보겠습니다. Arduin..
 아두이노 라인트레이서 완성!
아두이노 라인트레이서 완성!
짧은 영상이지만 라인트레이서는 완벽하게 잘 돌아갑니다!!! 라인트레이서 완성! 코드가 필요하시거나 도움이 필요하신분은 댓글로 문의주세요~ 코드 공개하였습니다. 도움이 되셨다면 댓글이나 남겨주세요! :) 123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121122123124125126127128129130131..
 아두이노 라인트레이서 모터 구동부
아두이노 라인트레이서 모터 구동부
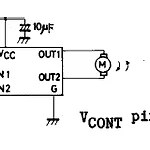
모터 구동부는 위와 같은 회로도 모형을 갖게 됩니다. 양쪽 모터를 이용하기 때문에 양쪽으로 2세트 만들어 주시면 됩니다. 위 모터 조작에 대한 소스코드입니다. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 //motor driver inputs #define Left_Wheel_1 9//left motor #define Left_Wheel_2 8 #define Right_Wheel_1 2//right motor #define Right_Wheel_2 3 void setup() { //Define motor pins as output to manage them. pinMode(Left_Wheel_1, OUTPUT); pinMode..
 아두이노 라인트레이서 발광 및 수광부
아두이노 라인트레이서 발광 및 수광부
라인트레이서는 적외선 발광부에서 빛을 쏘아 선에 반사된 빛을 수광소자가 받는 원리를 이용하여 선을 감지합니다. 이런 원리를 할 수 있는 회로도를 보여드리겠습니다. 라인트레이서 발광 및 수광부입니다. 발광소자는 항상 전원이 입력되어 항시 켜져 있습니다. 발광부는 하부의 선에 반사된 빛을 받아드린 후 그에 알맞은 값을 HIGH 또는 LOW로 출력하지만 제가 제작하는 라인트레이서는 ADC값을 이용하여 선을 감지하게 만들 것 입니다. 또한 위 회로도에 나와있는 A0, A1, A2, A3은 수광부의 신호를 감지하는 선이며 각 신호선들이 할당된 포트를 나타냅니다. 이에 해당하는 소스는 다음과 같습니다. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 ..