
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | 31 |
- 수광 소자
- Stack
- 아두이노
- 자료구조
- queue
- Algorithm
- Visual Micro
- 통계학
- list
- Arduino
- C언어
- 아두이노 컴파일러
- 운영체제
- directx
- arduino compiler
- priority_queue
- 라인트레이서
- LineTracer
- 아두이노 소스
- map
- html
- 시스템프로그래밍
- Array
- vector
- c++
- stl
- Deque
- WinAPI
- set
- 컴퓨터 그래픽스
- Today
- Total
목록Arduino (27)
Kim's Programming
 아두이노 Servo 모터 무한회전 개조
아두이노 Servo 모터 무한회전 개조
서보모터는 보통 180도 까지만 회전 할 수 있게 만들어 놓았습니다. 조정도 180도 까지만 되고 더 돌아가지도 않습니다. 서보모터를 바퀴와 같이 360도 회전이 가능하게 만들려면 개조가 필요합니다. 우선 동영상 먼져 보시면서 따라 하셔도 되지만, 중간중간 헷갈릴 부분만 짚겠습니다. Servo모터 개조 과정을 간단하게 말하면 다음과 같이 됩니다. 서보모터 분해 모터 엔코더 제어 부분을 제거(가변저항에 연결됨) 제거한 부분에 22옴 저항을 직렬 연결 서보모터 기어에 있는 180도 멈춤 돌기를 제거 합니다. 조립하고 확인을 합니다. 다른 것들을 따라하기 정말 간단하지만 간과하고 넘어가기 쉬운 부분만 하나 짚고 가겠습니다. Servo모터가 그냥 180도 멈춤 돌기만 제거하면 된다고 생각하는 경우가 생겨서 돌기..
이번포스팅에서는 아두이노의 기본 구조와 흔히쓰는 몇몇 함수들에 대해서 써보도록 하겠습니다. C언어 정도만 배워도 활용할 수 있게 간단하게 만들어진 아두이노는 몇몇만 알고 있어도 쉽게 이용 할 수 있습니다. 아두이노의 기본 구조를 구성하는 것들 1. #include 헤더를 인클루드 할떄 쓰는 문구입니다. 헤더란? 어떤 기능을 사용하기편하도록 미리 작성해놓은 파일을 말을 합니다. 그리고 아두이노에서는 일반 C 언어 프로그래밍과는 달리 라이브러리라는 개념을 이용 헤더를 인클루드 하되 라이브러리 단위로 불러들여서 사용을 하게 됩니다. 보통 아두이노 컴파일러를 설치 한 후 설치 경로에 있는 libraries경로에 들어가면 현재 설치 되어있는 라이브러리들을 볼 수 있습니다. 하지만, 내가 이용할 라이브러리가 없다면..
 아두이노 부트로더 단독 보드 복구
아두이노 부트로더 단독 보드 복구
아두이노보드가 업로드가 안되는 경우가 있습니다. 이경우 대부분 부트로더의 문제인데 보통 보드 두개를 이용한 방법 뿐이었습니다. 하지만 전 보드 하나만으로 부트로더 복구가 필요했고 몇시간동안 찾아본 결과 해결방법을 찾아 포스팅합니다. AVRDUDE를 사용해야 하는데 그냥 이용은 안되고WINAVR이란 프로그램을 설치하여 이용할 수 있습니다. 우선 WINAVR이란 프로그램을 설치합니다. 위의 파일들을 받아 설치합니다. 설치가 끝난뒤 명령 프롬프트를 키고 avrdude라고 쳐서 정상적으로 avrdude를 이용할 수 있는지 확인합니다. 위와 같이 뜨는경우 정상적으로 설치가 된것입니다. 자신의 보드를 확인합니다. 그리고 필요한 부트로더 파일을 찾아야합니다. C:\Program Files (x86)\Arduino\h..
 Arduino - Blink 아두이노 보드로 LED 깜빡거림을 구현해보자!
Arduino - Blink 아두이노 보드로 LED 깜빡거림을 구현해보자!
아두이노 보드를 이용하여 LED를 깜빡 거리게도 할 수 있습니다. LED는 HIGH 신호에 불이 켜지고 LOW 신호에 불이 꺼집니다. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 /* Blink Turns on an LED on for one second, then off for one second, repeatedly. Most Arduinos have an on-board LED you can control. On the Uno and Leonardo, it is attached to digital pin 13. If you're unsure what pin the on-board LED is connect..
 아두이노 ADC 값을 읽어보자
아두이노 ADC 값을 읽어보자
이번에 알아볼 예제는 ADC 값을 읽는 기본 예제 입니다. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 /* AnalogReadSerial Reads an analog input on pin 0, prints the result to the serial monitor. Attach the center pin of a potentiometer to pin A0, and the outside pins to +5V and ground. This example code is in the public domain. */ // the setup routine runs once when you press reset: void setup() { // initia..
 아두이노 servo 모터
아두이노 servo 모터
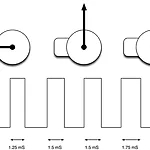
음 이번엔 서보 모터에 대해서 알아보겠습니다. 우선 작동원리입니다. 서보모터는 펄스의 길이에 따라서 움직이는 방향이 정해집니다. 음... 뭐 펄스가 감이 안온다면 직접 보면 되겠죠? 먼져 회로를 구성합니다 서보모터는 3가닥의 선으로 이루어 져 있습니다. Gnd Vcc 그리고 신호선 입니다. 위의 그림에서는 서보모터를 보드에 직접 연결을 하였으나. 사실 저렇게 연결을 해도 잘 움직이지 않습니다. 이유는 USB로 연결된 아두이노 보드의 전력이 서보 모터를 돌리기 어렵습니다. 그래서 중간에 전원을 따로 입력해 주어야 합니다 그렇게 저도 구성을 해보았습니다. (오른쪽에 가려진 부분은 전원입니다) 서보모터를 전원에 연결해주고 GND 레벨을 맞추기 위하여 CPU에도 전원을 연결하였습니다. 자 이제 코드를 입력해서 ..
 아두이노 초음파 센서의 이용
아두이노 초음파 센서의 이용
이번 포스팅에서는 초음파 센서에 대해서 알아 보겠습니다. 초음파센서의 기본 작동은 초음파를 쏴주고 되돌아오는 반사파를 읽어내는 것입니다. 초음파 센서는 올바르게 연결 후 소스코드를 활용하여 거리를 쟤게 되는데요 일단 소스코드 보고 가겠습니다 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 #define Echo 6 #define Trigger 7 long microsecondsToInches(long microseconds) { ..
 충돌 회피 로봇 부품
충돌 회피 로봇 부품
이번 충돌 회피 로봇에 사용될 주요 푸품들입니다. 1. 초음파 센서 4개의 핀 trigger, echo, + - 로 이루어진 초음파 센서입니다. 초음파를 발사하여 되돌아 오는 값을 측정하는 센서 입니다. 센서의 이용은 따로 포스팅 하겠습니다. 2. 서보모터 서보모터는 각도를 정밀하게 조절할 수 있는 모터입니다. 0~180도로 정밀하게 움직일 수 있는 모터인데 이 모터는 개조를 하여 바퀴로 이용할 것이며 그대로 사용하여 센서 방향 조절에 이용할 것입니다. 개조하는 법은 따로 포스팅 하겠습니다.